Industrial Robot Safety Inspection Checklist for Plant Managers 2026
By Josh Turly on May 14, 2026
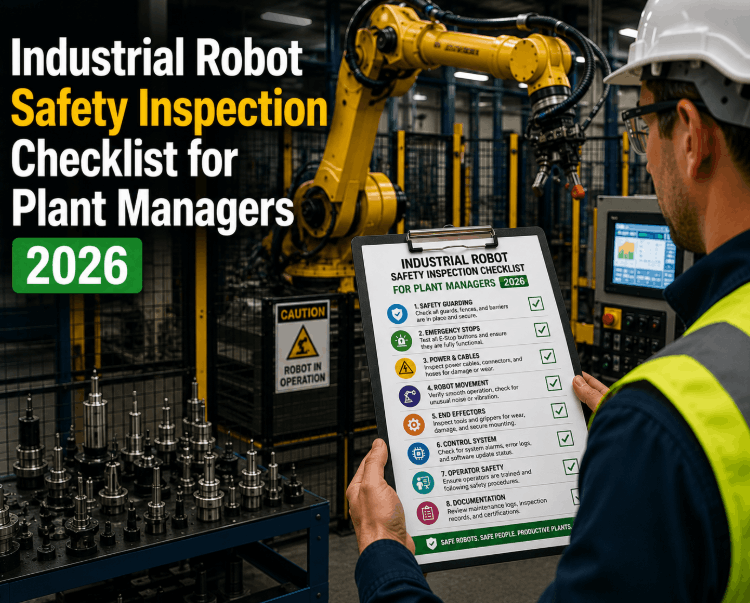
An industrial robot safety inspection checklist is the most critical tool a plant manager or EHS engineer can deploy to prevent catastrophic injuries, protect automation investments, and maintain OSHA compliance across every production shift. Industrial robots — collaborative arms, 6-axis welding robots, SCARA systems, and gantry units — represent capital expenditures of $80,000 to $600,000+ per cell. Yet the majority of robotic cell incidents trace directly to skipped safety audits: unverified emergency stops, degraded proximity sensors, frayed teach pendant cables, breached safety zones, and unchecked joint torque limits. This industrial robot safety inspection checklist 2026 covers every critical inspection category — mechanical joints, end-of-arm tooling, sensors, guarding, electrical, and collaborative robot (cobot) safety — giving manufacturing EHS managers and maintenance engineers a repeatable, auditable framework that reduces robotic cell incidents by up to 70%. Sign Up Free to digitize your robot safety inspection forms and track compliance across every cell on your plant floor.
Stop exposing your workforce and equipment to preventable robotic cell hazards. Oxmaint digitizes your industrial robot safety inspection checklist, assigns tasks to EHS teams, and tracks compliance in real time — shift after shift, cell after cell.
Joint integrity is the foundation of robotic cell safety. Worn bearings, loose fasteners, and degraded harmonic drives cause unpredictable arm motion that endangers workers and destroys tooling. A thorough mechanical joint inspection every shift catches early-stage failures before they become OSHA recordable incidents. Book a Demo to see how Oxmaint tracks joint inspection compliance and flags overdue mechanical audits automatically across your robotic fleet.
Joint & Mechanical ChecklistANSI/RIA R15.06 / ISO 10218-1
Inspection Phase 02
End-of-Arm Tooling (EOAT) and Gripper Safety Inspection
End-of-arm tooling failures account for a disproportionate share of industrial robot incidents. A dropped weld gun, a gripper that fails to release, or an improperly clamped part ejected at speed can cause fatal injuries. EOAT inspection must be performed before every production run and documented rigorously. Sign Up Free to automate EOAT inspection scheduling and compliance tracking across your entire robotic workcell fleet with Oxmaint.
Emergency Stop (E-Stop) and Safety Circuit Verification
Emergency stop circuit integrity is the most critical safety requirement in any industrial robot safety inspection. A non-functional e-stop in a robotic cell is an immediate OSHA citation and a life-safety emergency. Every e-stop device — pendant, perimeter, area scanner output, and fence interlock — must be physically tested and logged before production authorization. Book a Demo to see how Oxmaint enforces mandatory e-stop test logging with timestamp and operator signature capture before any production shift begins.
Proximity Sensor, Vision System, and Area Scanner Inspection
Safety sensors are the perceptual backbone of industrial robot hazard control. Contaminated laser scanners, misaligned light curtains, and drifted proximity sensors create invisible gaps in the protective field that allow workers to enter hazardous zones undetected. Sensor inspection must include functional verification — not just visual checks. Sign Up Free to schedule sensor calibration reminders and log functional test results across your entire safety sensor network via Oxmaint's digital maintenance platform.
Electrical failures in robotic workcells are responsible for both fire hazards and unexpected motion events. Frayed spiral cables on teach pendants, degraded motor power cables running through pinch points, and corroded connector bodies all represent serious industrial robot hazards that a routine electrical inspection prevents at minimal cost compared to the consequences of failure. Book a Demo to see how Oxmaint tracks teach pendant cable inspection intervals and escalates electrical anomalies to maintenance teams before they cause production stoppages.
Safety Guarding and Robotic Cell Perimeter Inspection
Physical guarding integrity is a non-negotiable OSHA requirement under 29 CFR 1910.212 and is explicitly addressed in ANSI/RIA R15.06 for industrial robot applications. Gaps in fencing, missing guard panels, and unrestricted access points are common findings during OSHA inspections that result in serious citations and production shutdowns. Regular perimeter inspections protect both workers and the organization's compliance standing.
Collaborative robots (cobots) operating under ISO/TS 15066 power and force limiting (PFL) mode present unique safety inspection requirements. Unlike traditional caged robots, cobots rely on software-enforced speed and force limits, skin-safe surface materials, and validated stopping performance to protect co-workers in shared workspaces. A missed cobot safety inspection can allow a speed limit override or force threshold drift that transforms a collaborative application into a high-risk one without any visible indication to operators.
Cobot Safety ChecklistISO/TS 15066 / ISO 10218-1&2 / ANSI/RIA R15.06
Reference Standards
Industrial Robot Safety Inspection Frequency and Standard Reference by System
Your robotic cells are running. Your safety inspections should not be on paper. Oxmaint puts every robot safety inspection step on your EHS team's phone, captures photos and readings in real time, and gives plant managers instant compliance visibility across every cell — shift after shift.
Why is a daily industrial robot safety inspection checklist required under OSHA?
OSHA 29 CFR 1910.212 requires employers to ensure machine guarding protects operators from hazardous robot motion. A daily inspection checklist documents compliance with this requirement and creates an auditable record that demonstrates due diligence during incident investigations. Consistent checklist use also reduces robotic cell incidents by identifying developing hazards before they result in recordable injuries or fatalities.
How often should industrial robot emergency stops be physically tested?
Emergency stop devices on industrial robots must be physically tested at every shift start — not just visually inspected. ISO 13850 and ANSI/RIA R15.06 require verification of e-stop functionality before authorizing production. Each test result, including which device was tested, by whom, and at what time, should be logged in a maintenance management system to create a defensible compliance trail for OSHA and insurance purposes.
What is the difference between robot safety inspections for traditional robots versus collaborative robots (cobots)?
Traditional industrial robot inspections focus on physical guarding integrity, e-stop circuits, and mechanical component condition. Cobot safety inspections under ISO/TS 15066 additionally require verification of power and force limiting (PFL) thresholds using a calibrated force gauge, surface condition checks for sharp edges or damage, and safety parameter audit log review. Cobots operating without physical fencing place the entire protective burden on speed and force limits and safety sensor systems, so these must be verified before every single production run.
What standards govern industrial robot safety inspections in manufacturing plants?
The primary standards governing industrial robot safety inspections include ANSI/RIA R15.06 (United States), ISO 10218-1 and ISO 10218-2 (international robot safety for design and integration), ISO/TS 15066 (collaborative robot safety), OSHA 29 CFR 1910.212 (machine guarding), ISO 13850 (emergency stop requirements), IEC 61496 (safety light curtains), and NFPA 79 (electrical safety for industrial machinery). Compliance with these standards forms the defensible foundation of any industrial robot safety program.
How can a digital robot safety inspection checklist improve OSHA audit readiness?
Digital robot safety inspection checklists automatically generate timestamped, operator-signed inspection records that can be exported instantly for OSHA compliance audits, insurance reviews, and ISO 45001 certification assessments. Paper-based inspection logs are frequently incomplete, illegible, or lost. Digital maintenance platforms provide real-time supervisor visibility into missed inspection steps and automatically escalate critical findings for corrective action work orders before the next shift begins.
What are the most critical checks in an industrial robot arm safety inspection?
The most critical robot arm safety inspection checks are mechanical brake verification on all axes, joint backlash and play assessment, teach pendant cable integrity, emergency stop functional testing, and safety zone boundary confirmation. Brake failure on a loaded axis creates an immediate gravity-drop hazard. Degraded brakes and loose joint fasteners are the leading mechanical causes of unexpected robot motion events that result in serious injuries to maintenance and production personnel.
How does a robot hazard assessment differ from a routine safety inspection checklist?
A robot hazard assessment is a structured risk evaluation conducted before a robot is put into service or when applications change. It identifies hazards, estimates risk levels, and defines the risk reduction measures required. A routine robot safety inspection checklist is the recurring operational verification that the risk reduction measures defined in the assessment are functioning correctly and have not been degraded. Both are required elements of a complete robot safety program under ISO 10218-2.
What robot maintenance checks prevent loss of positional accuracy over time?
Key checks that prevent accuracy loss include joint fastener torque verification, gear oil level inspection, encoder cable integrity, auto-lubrication system confirmation, and verification that payload settings in the controller match the actual tooling mass. Accumulated wear from missed lubrication intervals and loose fasteners causes positional drift that appears as part quality defects before it progresses to a safety event, making these checks both a quality assurance and a safety compliance priority.
Every Robotic Cell. Every Shift. Every Safety Inspection Step — Tracked and Verified.
Oxmaint's digital maintenance and safety platform puts your complete industrial robot safety inspection checklist on your EHS team's mobile devices, captures inspection readings, sensor test results, and compliance photos in real time, alerts supervisors to skipped critical steps instantly, and generates OSHA-ready compliance reports for audits and insurance reviews. Stop relying on paper inspection forms that disappear in binders at shift end. Start building the robot safety inspection discipline that protects your workforce, your capital equipment, and your regulatory standing — shift after shift, cell after cell.
-for-manufacturing-plants-a-2026-guide.png)
.png)