Power plant inspections that require scaffolding, confined-space entry, or full unit shutdowns are no longer the only option — and plants still relying on them are paying a premium in downtime, labor cost, and safety exposure that autonomous inspection technology has already eliminated elsewhere. Connect OxMaint CMMS to your robotic and drone inspection workflow and convert every inspection finding into a tracked, scheduled, and closed work order automatically. Book a 30-minute OxMaint demo to see how inspection data flows from autonomous systems directly into maintenance planning — at no cost, no commitment.
Autonomous Inspection · Power Generation · OxMaint CMMS
Robotic and Drone Inspection for Power Plant Predictive Maintenance
Crawler robots, aerial drones, and tethered inspection platforms enter confined spaces, boiler interiors, and cooling towers your crews cannot safely access — streaming visual, thermal, and ultrasonic anomaly data directly into OxMaint maintenance work orders before degradation becomes downtime.
80%
Reduction in inspection-related shutdown hours vs traditional access methods
3×
More inspection coverage per shift — robots and drones reach all positions simultaneously
Zero
Personnel required in confined spaces, high-heat, or high-radiation inspection zones
<4 hrs
From inspection completion to OxMaint work order with findings attached
The Problem With Traditional Inspection
Why Manual Inspections Are Failing Power Plant Reliability Programs
Traditional power plant inspection relies on periodic manual surveys that create structural blind spots — narrow coverage windows, access-driven scheduling, and findings that never reliably reach the CMMS as actionable work orders.
Access Limits Coverage
Only 35%
of a typical boiler's internal surface is reachable by inspection crews without scaffolding — meaning 65% of degradation risk goes unseen between planned outages.
Outages to Inspect
6–14 Days
Typical generation lost per mandatory inspection outage where scaffolding, cooling, and confined-space entry protocols are required — a cost robot inspection eliminates or drastically cuts.
Findings Lost in Transit
58%
of inspection findings documented on paper or in disconnected tools never generate a CMMS work order — degradation is found but never formally tracked or repaired on schedule.
Inspection Frequency
1–2×/Year
Manual inspection frequency for most confined-space assets — versus continuous or monthly robot-assisted inspection programs that catch fast-progressing defects before they grow critical.
Inspection Technology
Two Platforms, One Coverage Strategy — Drones and Crawler Robots Compared
Aerial drones and ground-based crawler robots solve different inspection problems in the same plant. Understanding where each excels determines which assets get which platform — and how together they close every coverage gap.
Best for: Open-volume, elevated, large-surface assets
Cooling Towers
Visual and thermal inspection of fill media, fan blades, and structural surfaces — without personnel entry or shutdown. Full coverage in 45–90 minutes.
Stack and Chimney Liners
Internal visual survey of refractory, liner cracks, and joint degradation — replacing rope-access teams at a fraction of the cost and time.
Turbine Hall Roofing
Structural and thermal surveys of large roof areas, cladding, and overhead pipework for heat loss, moisture ingress, and surface corrosion.
Outdoor Switchyard
Thermal imaging of transmission equipment, insulators, and bus connections to detect hotspots indicating imminent electrical failure.
Payload: Optical + thermal camera · LIDAR optional · GPS-denied capable
Best for: Confined spaces, pressure vessels, pipe interiors
Boiler Furnace Walls
Magnetic-track crawlers navigate vertical furnace walls inspecting tube thickness, weld integrity, and refractory condition via ultrasonic and visual sensors.
Pressure Vessel Interiors
Tethered robotic platforms survey condensers, heat exchangers, and steam drums for corrosion, pitting, and scale buildup — without confined-space personnel entry.
Underground Pipe Networks
Pipeline inspection robots assess wall thickness and internal corrosion across cooling water, fuel, and condensate systems without excavation or flow interruption.
Generator Stator Bores
Miniature bore robots inspect stator winding condition, end-winding vibration marks, and insulation surface condition without full rotor extraction.
Sensors: UT thickness · Visual · Acoustic · Thermal · Eddy current
CMMS Integration Flow
From Robot Inspection Finding to OxMaint Work Order — 5 Stages
The gap between inspection finding and maintenance action is where defects quietly worsen. This five-stage workflow closes that gap — connecting every autonomous inspection platform directly to OxMaint so no finding is lost and no repair is delayed.
Step 1
Inspection Mission
Drone or crawler robot executes pre-programmed inspection route — collecting high-resolution visual, thermal, and ultrasonic data at each defined waypoint or measurement location.
↓
Step 2
AI Anomaly Scoring
Onboard or cloud AI model analyzes captured images and sensor readings — classifying corrosion, cracks, thermal anomalies, and thickness deviations against severity thresholds.
↓
Step 3
Findings Report Generated
Structured inspection report is produced automatically — anomaly location mapped to asset drawing, severity graded, and recommended action assigned based on defect classification.
↓
Step 4
OxMaint API Trigger
Findings above configured severity threshold trigger OxMaint webhook — passing asset ID, anomaly type, location coordinates, visual evidence, and recommended repair scope.
↓
Step 5
Work Order Created
OxMaint creates a maintenance work order — asset linked, inspection images attached, technician assigned, and priority set — ready for planned action before the inspection crew has left the site.
Every finding your drones and robots capture deserves a maintenance work order — not a PDF report no one reads.
OxMaint closes the loop between autonomous inspection and maintenance execution. Connect your inspection platform in under 6 weeks — no custom development required.
Asset Coverage Map
Which Inspection Platform for Which Power Plant Asset
Selecting the wrong inspection method for an asset wastes budget and misses failure modes the right platform would catch. This coverage map matches each critical asset to its optimal inspection approach and connects each finding category to the OxMaint work order it generates.
| Asset |
Inspection Platform |
What It Detects |
Inspection Frequency |
OxMaint Work Order Type |
| Gas Turbine Compressor |
Borescope Robot |
Blade erosion, FOD damage, coating degradation, tip clearance changes |
Every 4,000 operating hours |
Corrective — blade repair or replacement |
| Boiler Furnace |
Magnetic Crawler |
Tube wall thinning, weld cracking, refractory damage, waterwall corrosion |
Annually — or post-thermal event |
Condition-based — tube repair priority ranked |
| Cooling Tower |
Aerial Drone |
Fill media degradation, fan blade cracks, basin fouling, structural deterioration |
Quarterly — or after weather events |
Preventive — cleaning or structural repair |
| Steam Generator Tubes |
Eddy Current Robot |
Wall pitting, SCC cracking, erosion at support plates, baffle damage |
Every major outage cycle |
Predictive — tube plugging or replacement |
| Condenser Interior |
Tethered Crawler |
Tube fouling, erosion-corrosion, bio-growth, tube-sheet joint degradation |
Semi-annually |
Corrective — chemical clean or retubing |
| Chimney Stack |
Internal Drone |
Liner cracks, refractory spalling, joint separation, moisture ingress paths |
Annually |
Condition-based — liner repair or patch |
Measured Impact
What Changes When Autonomous Inspection Replaces Manual Surveys
These outcomes are measured at power plants that replaced periodic manual inspection programs with robot and drone-assisted inspection connected to CMMS — tracked across the first 24 months of deployment.
80%
Less Inspection Downtime
Confined-space and elevated-access inspection completed while assets remain partially or fully online — eliminating outage days previously scheduled for access preparation alone.
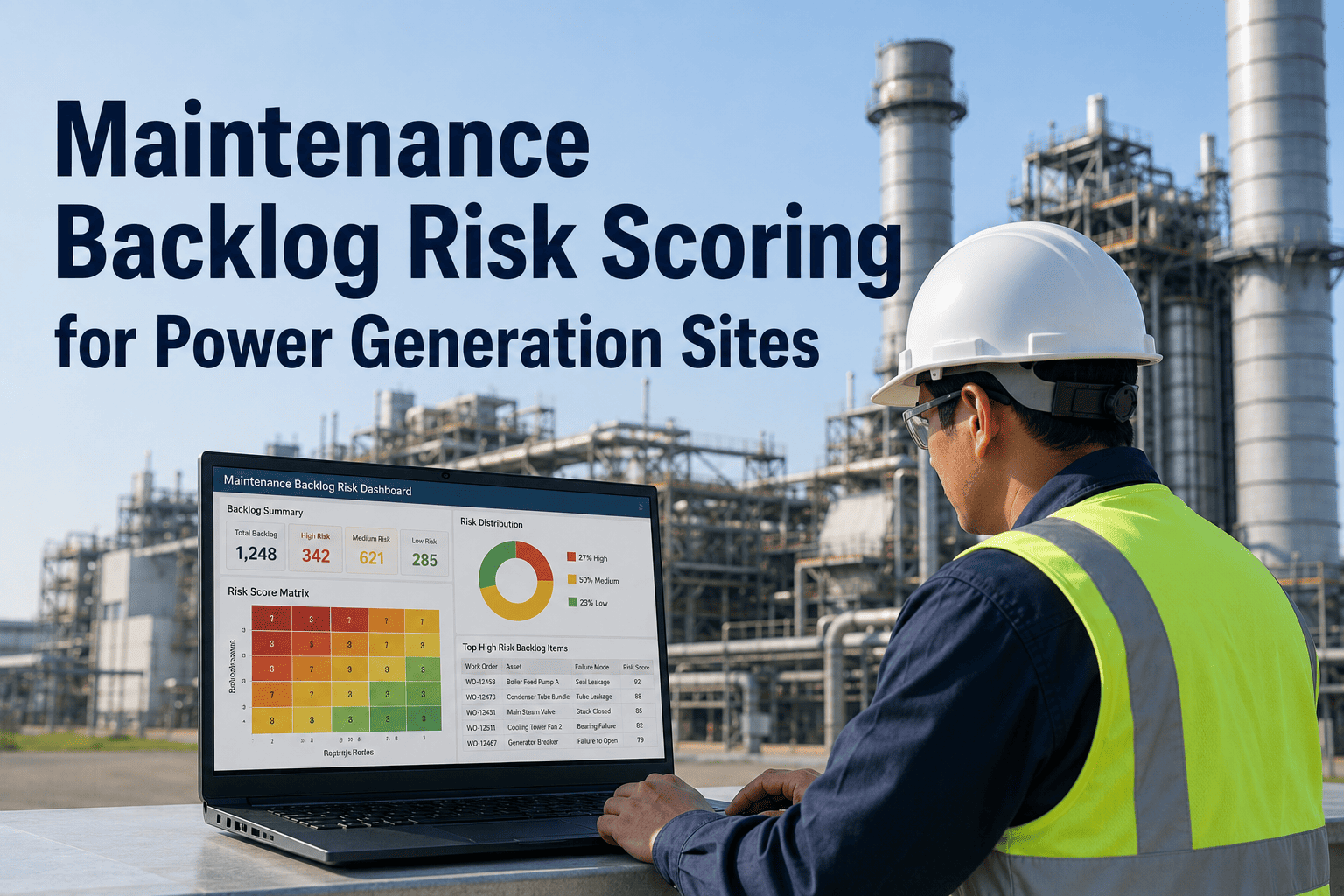
3.4×
More Defects Found Per Inspection
Full surface coverage, consistent measurement intervals, and AI-assisted anomaly scoring identify defects in locations and at sizes that manual visual inspection routinely misses.
100%
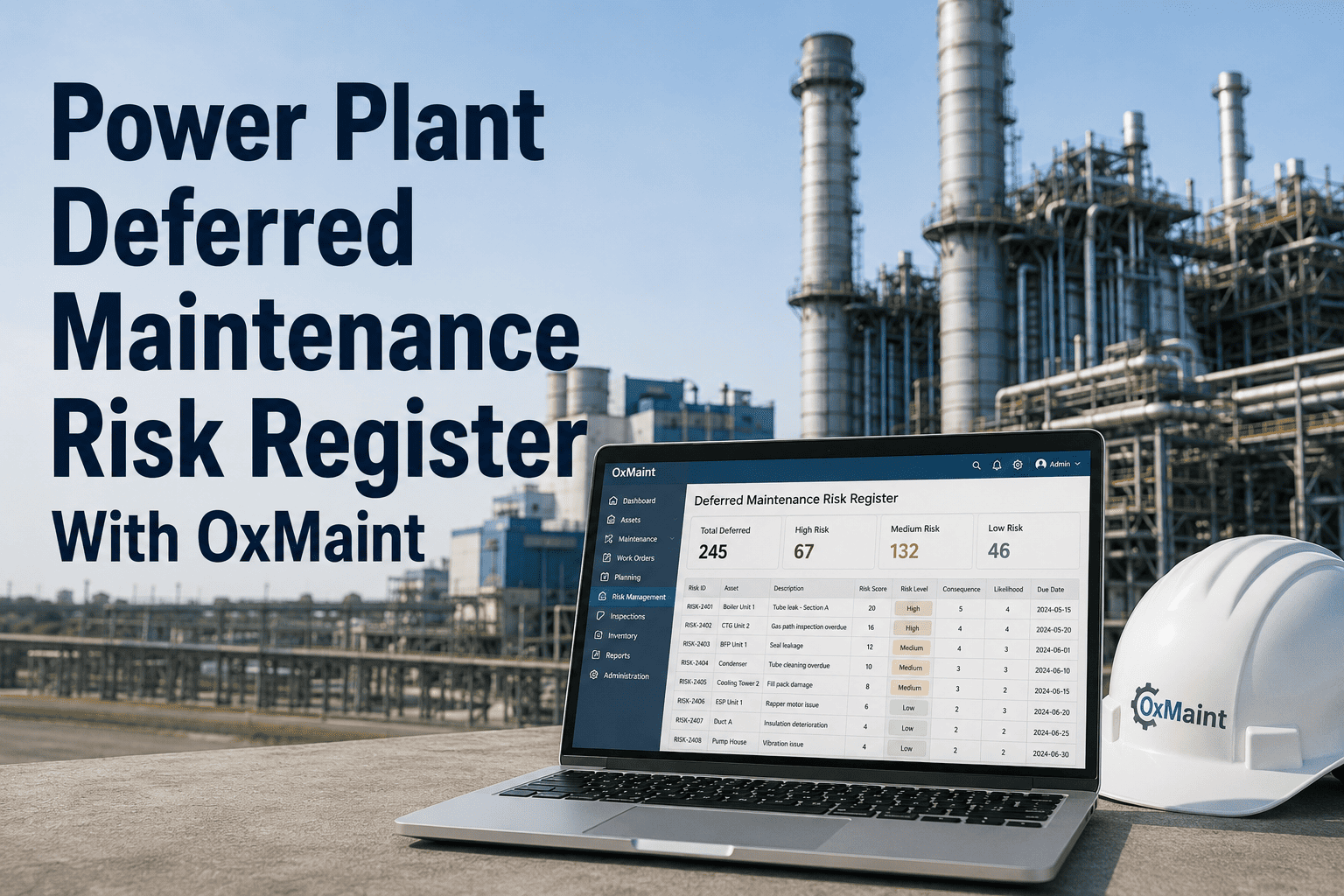
Inspection-to-CMMS Finding Rate
Every finding above severity threshold automatically generates an OxMaint work order — eliminating the 58% finding loss rate observed in manual paper-based inspection programs.
62%
Reduction in Safety Incidents
Removing personnel from confined spaces, high-heat environments, and elevated positions eliminates the most common categories of inspection-related safety incidents and near-misses.
NDT Methods On Board
Non-Destructive Testing Methods Deployed by Inspection Robots
Modern inspection robots and drones carry multiple non-destructive testing modalities on a single platform — collecting visual, thickness, thermal, and electromagnetic data in one pass rather than requiring separate inspection teams for each method.
Visual + High-Res Optical
Surface corrosion, coating failure, crack opening, erosion wear, weld bead quality
Resolution: 4K+ optical — AI detects sub-millimetre cracks in still frames
Ultrasonic Thickness (UT)
Pipe wall remaining thickness, tube wall thinning, weld integrity, lamination detection
Accuracy: ±0.1mm at speeds up to 0.5 m/s on magnetic-track crawlers
Infrared Thermography
Thermal hotspots in electrical equipment, insulation voids, refractory damage, bearing overtemperature
Sensitivity: 0.05°C NETD — detects hotspots invisible to optical cameras
Eddy Current (EC)
Surface and sub-surface cracks in non-ferrous tubes, heat exchanger tube pitting, SCC detection
Depth penetration: Up to 6mm in non-ferrous materials
Questions Answered
Robotic and Drone Inspection — What Power Plant Teams Ask
Can drones legally fly inside power plant facilities without a shutdown?
Indoor drone operations inside turbine halls, boiler enclosures, and cooling towers are conducted under controlled-airspace rules that apply to enclosed, non-public facilities — most jurisdictions require operational risk assessment and local authority notification, not full airspace licensing. Purpose-built indoor inspection drones operate without GPS using optical-flow and LIDAR navigation, and do not require operating unit shutdowns for external structure surveys.
OxMaint's inspection work order templates include pre-inspection safety checklists and airspace documentation fields to support your compliance process. Most power plants complete their first indoor drone inspection within 60 to 90 days of program initiation.
How does inspection robot data connect to OxMaint without manual data entry?
OxMaint integrates with robotic inspection platforms through webhook and REST API connections — when an inspection system classifies an anomaly above the configured severity threshold, it triggers an API call that creates a work order in OxMaint automatically, with the asset linked, inspection images attached, and anomaly details mapped to the asset location.
Book a technical integration call to review your inspection platform's API output format against OxMaint's work order schema. Most integrations require one to two engineering days — no custom development is required from the plant's maintenance team.
What is the ROI timeline for robotic inspection investment in a power plant?
Power plants typically recover robotic inspection program investment within 12–18 months — primarily through outage day reduction, elimination of confined-space access costs, and the value of defects caught and repaired before they escalate to forced outage events. A single avoided unplanned turbine outage typically recovers two to three years of robotic inspection program cost.
Sign up for OxMaint free to begin tracking inspection findings against maintenance outcomes — the data foundation for calculating your plant's specific ROI from inspection program improvement. Equipment lifespan extension and safety incident reduction further compound the return in years two and three.
Do robotic inspections replace or supplement traditional inspection crews?
Robotic inspection supplements and re-roles inspection crews rather than replacing them — robots handle data collection in hazardous, confined, and elevated locations while experienced inspectors focus on engineering judgement, anomaly verification, and repair scope definition. Inspection team productivity increases significantly because crews spend zero time on scaffolding, rigging, or confined-space entry protocols.
Explore how OxMaint structures inspection roles and approval workflows to see how robotic findings route through your existing team hierarchy — full configurable approval chains with mobile access for field verification before work orders are released to maintenance crews.
Autonomous Inspection · Zero Blind Spots · OxMaint CMMS
Your Robots See the Defects. OxMaint Makes Sure They Get Fixed.
Every crack, hotspot, thinning wall, and degraded surface your inspection drones and crawlers find becomes a tracked, scheduled, and closed OxMaint work order — automatically, with full evidence attached. Stop losing inspection findings to disconnected reports. Start closing the loop between autonomous inspection and maintenance execution.