Collaborative robots operating alongside warehouse staff in pick zones, packing lines, and goods-to-person stations represent a fundamentally different maintenance challenge than either traditional fixed automation or fully autonomous systems. A cobot that drifts 2mm out of calibration doesn't just produce errors — it becomes an active safety risk to the person working 18 inches away from its end-of-arm tooling. A cobot whose force-torque sensor degrades doesn't trigger an alarm; it simply stops detecting contact correctly, which means it can apply forces the collaborative safety design was meant to prevent. Unlike conveyors or sortation systems, cobots require a maintenance program that simultaneously addresses mechanical wear, sensor calibration, software parameter integrity, and human-facing safety compliance — and tracks all of it against a documented, auditable record. A CMMS built for modern warehouse operations gives your maintenance team the asset tracking, inspection scheduling, and compliance documentation framework that cobot manufacturers recommend and that safety regulators increasingly expect.
Warehouse Robotics Maintenance
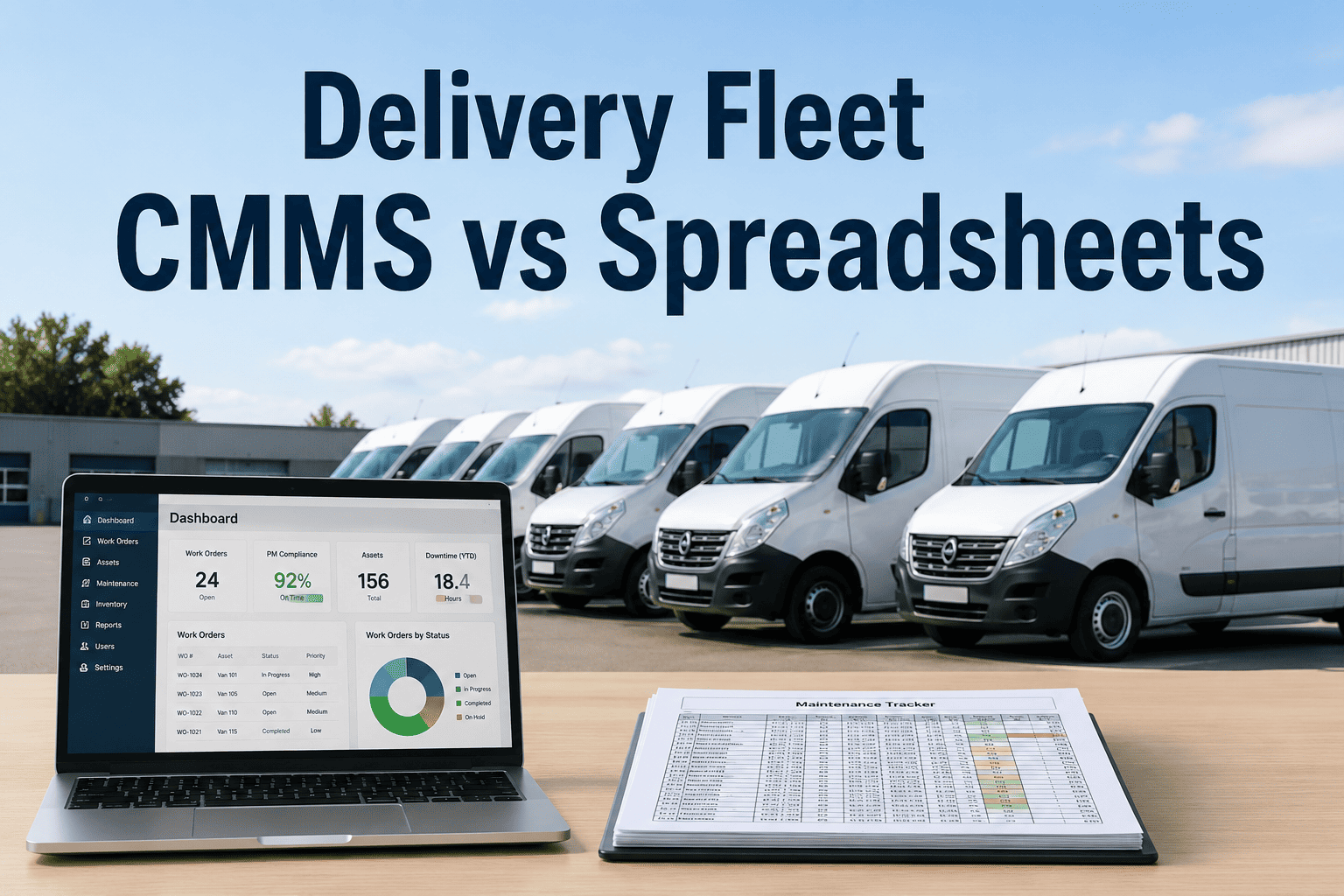
Cobots Work Beside Your People. Maintenance Has to Protect Both.
A cobot with degraded force sensing, drifted calibration, or worn end-of-arm tooling isn't just an error source — it's a safety incident waiting to happen. Here's the structured CMMS maintenance program that keeps human-robot collaboration safe every shift.
ISO 10218
Robot safety standard requiring documented inspection records
78%
Of cobot incidents attributed to maintenance or calibration gaps
2x
Higher cobot uptime in facilities with structured CMMS PM programs
Why Cobots Need a Different Maintenance Strategy
Fixed Automation
Traditional Robots and Conveyors
Guarded behind safety fences — humans never in contact zone
Maintenance focuses on mechanical wear and electrical reliability
Calibration drift affects product quality, not worker safety
Failure modes are usually visible before they cause harm
Cobots
Collaborative Robots
Operate in shared space — contact with workers is designed-in
Maintenance must cover sensors, software parameters, and mechanical wear together
Calibration drift affects both product quality and worker safety
Sensor failure modes are often invisible until a safety incident occurs
Fully Autonomous
AMRs and Autonomous Systems
Human interaction is incidental — systems are designed to avoid contact
Maintenance focuses on navigation, battery, and drive systems
Safety zones create separation — calibration drift affects path accuracy
Fleet management systems often handle self-diagnostics
The Four Cobot Maintenance Domains Every Program Must Cover
01
Mechanical Wear and Joint Integrity
Cobot joints accumulate backlash over millions of cycles. Harmonic drive wear in articulated joints increases positioning error over time — what started as ±0.02mm repeatability drifts toward ±0.1mm or beyond without scheduled inspection. At collaborative workspace distances, that drift matters far more than it would in a caged system.
CMMS-Tracked Tasks
Joint backlash measurement at every 2,000 operating hours
Gear oil sampling and lubrication service per OEM schedule
End-of-arm tooling fastener torque check monthly
Cable bundle inspection for chafing at high-flex zones quarterly
02
Force-Torque and Collision Sensor Calibration
The force-torque sensor at the wrist joint is the primary safety mechanism that causes a cobot to stop when it contacts a human. Sensor drift — from mechanical shock, temperature cycling, or simply age — means the cobot may be detecting contact at the wrong threshold. This is the highest-consequence maintenance failure in a collaborative application and the one most frequently skipped.
CMMS-Tracked Tasks
Force-torque sensor calibration verification against certified reference load monthly
Contact stop threshold test at rated payload and maximum reach quarterly
Sensor zero-point drift check after any significant impact or drop event
Full sensor recertification annually or after any firmware update
03
Software Parameter and Safety Configuration Integrity
Cobot safety parameters — speed limits, force thresholds, workspace boundaries, and stop categories — are software-configured. These parameters can be inadvertently altered during program updates, software patches, or operator-level access. CMMS maintenance records must include a parameter validation check after any software event, ensuring the safety configuration matches the last certified baseline.
CMMS-Tracked Tasks
Safety parameter verification against certified baseline after every software update
Workspace boundary limit check monthly — confirm virtual fences match physical layout
Speed and force limit audit against risk assessment values quarterly
Full safety system functional test after any hardware or software change
04
End-of-Arm Tooling (EOAT) Condition and Safety
The end-of-arm tooling presents the surface that directly contacts both products and potentially people. Sharp edges developing on worn grippers, suction cup cracking on vacuum tools, and fastener loosening on heavy tooling all introduce hazards that weren't present when the cobot was installed and risk-assessed. EOAT maintenance is often treated as informal — CMMS tracking formalizes it with documented inspection records.
CMMS-Tracked Tasks
EOAT visual inspection for sharp edges, cracks, and deformation weekly
Gripper force measurement at rated payload monthly
Vacuum cup integrity test for suction tools — leak-down rate measurement monthly
EOAT fastener torque verification and anti-rotation feature check quarterly
Is Your Cobot Fleet's Safety Maintenance Documented and Auditable?
ISO 10218 and ISO/TS 15066 expect documented evidence that collaborative robot safety systems are maintained and verified. OxMaint tracks every sensor calibration, parameter check, and EOAT inspection against the specific cobot asset — building the compliance record your HSE team and your insurance auditor will ask for.
Cobot PM Schedule: Frequency by Maintenance Domain
Swipe right to see full table
| Maintenance Task |
Domain |
Frequency / Trigger |
Completion Evidence in CMMS |
| Force-torque sensor calibration verification |
Sensor |
Monthly + after any impact |
Calibration data log and technician sign-off |
| Safety parameter baseline audit |
Software |
After every software update |
Parameter comparison report attached to WO |
| Joint backlash measurement |
Mechanical |
Every 2,000 operating hours |
Measured values vs OEM specification logged |
| EOAT visual inspection |
EOAT |
Weekly |
Photo attachment + pass/fail checklist |
| Contact stop threshold test |
Sensor |
Quarterly |
Test result vs certified threshold value |
| Cable bundle chafing inspection |
Mechanical |
Quarterly |
Inspection checklist with photo |
| Workspace boundary verification |
Software |
Monthly |
Layout sketch match confirmed, signed |
| Full safety system functional test |
All domains |
Annually + after any hardware change |
Test protocol completion report, dual sign-off |
| Gear lubrication service |
Mechanical |
Per OEM interval (typically 8,000 hrs) |
Parts used, lot numbers, technician ID logged |
| EOAT fastener torque verification |
EOAT |
Quarterly |
Torque values recorded per fastener point |
What Good CMMS Records Look Like for a Cobot Asset
Asset Profile
Cobot ID, model, serial number, installation date
Workspace location and assigned work cell
Certified safety parameters baseline (version-controlled)
EOAT specification and rated payload
Software version history with change dates
Maintenance History
Every completed work order with technician name and timestamp
Sensor calibration results with reference load values
Joint backlash measurements trend by operating hour
EOAT inspection photos and pass/fail records
All parts replaced with part numbers and lot numbers
Compliance Documentation
Safety parameter audit reports by date
Annual functional test protocols with dual sign-off
Risk assessment reference linking to maintenance program
Incident and near-miss records linked to asset
Export-ready audit report for ISO, OSHA, or customer inspections
Frequently Asked Questions
How often should cobot force-torque sensors be calibrated in a warehouse environment?
Monthly verification against a certified reference load is the standard recommendation for high-cycle warehouse applications. In addition, any significant impact event — even a minor collision during a task error — should trigger an immediate out-of-schedule calibration check before the cobot returns to collaborative operation. CMMS impact event logging ensures this check is never skipped.
What standards govern cobot maintenance documentation in warehouse settings?
ISO 10218 parts 1 and 2 cover industrial robot safety requirements including maintenance obligations. ISO/TS 15066 addresses collaborative robot applications specifically and references ongoing monitoring of safety-relevant parameters. OSHA 29 CFR 1910.217 applies to mechanical power presses but regulatory guidance on collaborative robots continues to evolve — documented CMMS records are the best protection in any inspection scenario.
Can CMMS track cobot operating hours to trigger usage-based maintenance?
Yes. OxMaint integrates with cobot runtime APIs and warehouse management systems to pull actual operating hours per unit. Usage-based work orders — like joint backlash checks at 2,000 hours — generate automatically when the threshold is reached, regardless of calendar date. This is especially important for cobots with variable utilization across shifts and seasons.
What happens to CMMS maintenance records when a cobot is relocated to a different work cell?
In OxMaint, the cobot asset record travels with the unit — all historical maintenance data, calibration records, and compliance documents remain attached to the asset ID regardless of physical location. A relocation triggers a mandatory workspace boundary verification work order automatically, ensuring the safety configuration is validated for the new cell layout before collaborative operation resumes.
Safe Cobots. Documented Compliance. Uninterrupted Delivery.
Every Shift Your Cobot Runs Without a Maintenance Record Is a Shift Your Safety Case Has a Gap.
OxMaint gives warehouse robotics teams the structured PM scheduling, sensor calibration tracking, safety parameter audit trails, and compliance export tools to run collaborative robot programs that satisfy ISO standards, protect workers, and keep delivery operations running without interruption. Join warehouse operations worldwide running safer, smarter robotics maintenance on OxMaint.