Best Digital Twin for Predictive Robot Failure Analysis 2026
When a $400,000 robotic welding arm seizes mid-cycle on a Friday night—destroying a partially assembled chassis, halting the entire production line, and triggering 72 hours of emergency overtime—the real cost isn't the replacement servo motor. It's the $1.2 million in lost throughput, scrapped product, and expedited air-freight parts that could have been avoided entirely. A Digital Twin of that robot, running a physics-based simulation in parallel with the physical machine, would have flagged the bearing degradation pattern 19 days earlier—giving your team time to schedule a 45-minute repair during a planned changeover.
This guide provides reliability engineers, automation managers, and maintenance directors with a comprehensive framework for deploying digital twin technology to predict robotic equipment failures in 2026. We cover the complete lifecycle from virtual model creation and sensor data ingestion to AI-driven failure prediction and CMMS-integrated repair scheduling. Teams ready to eliminate unplanned robot downtime can start their free trial today.
Industry Reality
The True Cost of Unplanned Robot Downtime
70%
of manufacturers lack visibility into robot component degradation before failure occurs
45%
reduction in unplanned downtime achieved by organizations using digital twin predictive models
85%
failure prediction accuracy when combining physics-based digital twins with real-time sensor data
Effective predictive maintenance for robotics requires more than vibration sensors bolted to a gearbox. It demands a living virtual replica—a digital twin—that mirrors the robot's kinematics, load profiles, thermal behavior, and wear patterns in real time. By fusing simulation with sensor telemetry and CMMS workflows, maintenance teams shift from reacting to failures to scheduling repairs weeks before breakdowns occur.
The Digital Twin Lifecycle for Robotics
Successful digital twin deployment follows a structured lifecycle. Each phase—from virtual model creation to continuous learning—requires specific engineering activities, data integration, and validation steps. Skipping phases or treating the digital twin as a static model undermines its predictive power and erodes team trust in the system's outputs.
Digital Twin Deployment Framework
From virtual model to predictive intelligence
01
Model & Map
Build physics-based virtual model of robot kinematics, load paths, thermal profiles, and wear-critical components from OEM data
02
Connect & Ingest
Stream real-time sensor data (torque, temperature, vibration, current draw) from robot controllers into the digital twin engine
03
Simulate & Predict
Run accelerated degradation simulations to forecast remaining useful life (RUL) of gears, bearings, servos, and cables
04
Act & Optimize
Auto-generate CMMS work orders with predicted failure window, required parts, and optimal repair timing aligned to production schedules
Implementing a unified digital twin platform allows reliability teams to monitor every robot's virtual health state in a single system of record. Automated workflows convert degradation predictions into scheduled maintenance actions, ensuring that critical repairs happen during planned windows—not during peak production. Digital documentation provides the audit trail needed for OEE reporting and warranty claims. Book a Demo.
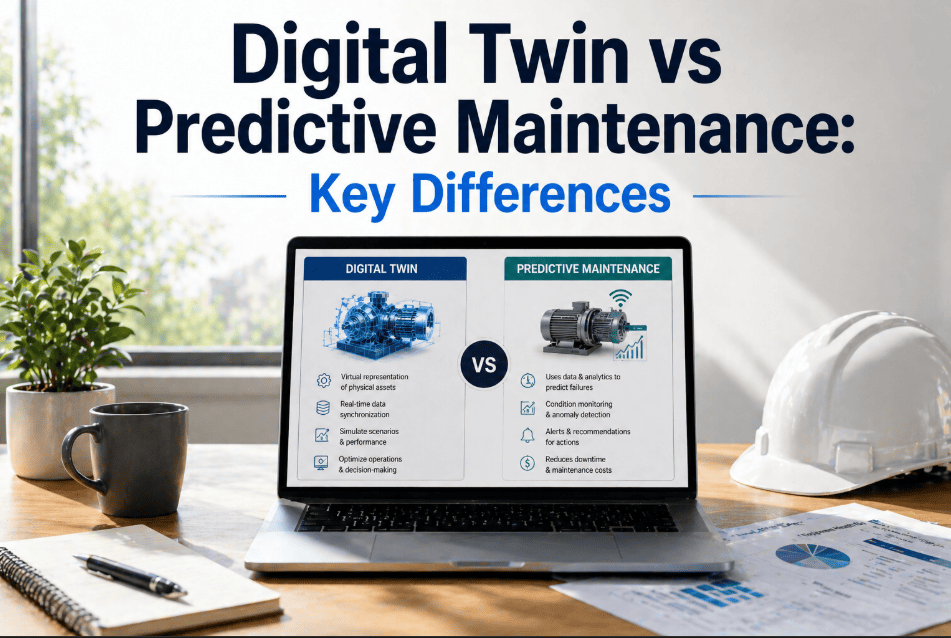
Prediction Approaches: Reactive vs. Digital Twin
Maintenance teams must choose between traditional reactive/preventive strategies and modern digital twin-driven predictive approaches. While time-based maintenance was the industry standard for decades, it either replaces components too early (wasting money) or too late (causing failures). Digital twins offer a fundamentally different paradigm—maintaining based on actual computed condition rather than calendar intervals.
Maintenance Strategy Comparison
1
Reactive / Time-Based (Legacy)
Replace parts on fixed schedules regardless of actual wear
No visibility into real-time component degradation
Unexpected breakdowns halt entire production cells
Excessive spare parts inventory as buffer against surprises
Post-mortem root cause analysis after costly failures
Maintenance windows based on guesswork and OEM intervals
Suitable only for non-critical, low-value equipment
Wasteful & Unpredictable
2
Digital Twin Predictive (Modern)
Physics-based simulation mirrors actual robot condition
Real-time RUL predictions for every critical component
Failures predicted 2-8 weeks before they occur
Just-in-time parts ordering based on predicted need dates
Pre-mortem analysis prevents failures from ever happening
Repairs scheduled to align with production changeovers
Essential for high-value robotic automation environments
Precise & Proactive
Choosing a digital twin strategy is a competitive decision. Integrated maintenance platforms support predictive models by providing flexible workflows for work order generation, parts procurement, and historical failure tracking—regardless of robot OEM or generation.
Digital Twin Impact Metrics
Measured improvements from twin-driven predictive maintenance
45%
Downtime Reduction
Predicted vs. Unplanned
30%
Parts Cost Savings
Just-in-Time Ordering
85%
Prediction Accuracy
Failure Forecasting
3-5x
ROI Return
Within 18 Months
Core Components of a Robot Digital Twin
A robot digital twin is more than a 3D model on a screen. It is a computational engine that ingests real-time operational data and runs physics simulations to predict how each component will degrade under actual working conditions. The architecture spans four critical layers—from physical sensors on the robot to AI analytics in the cloud and automated actions in the CMMS. Book a Demo.
Essential Layers of a Robot Digital Twin
Physical Layer
IoT sensors on robot joints measuring torque, vibration, temperature, and current draw. Controller data streams via OPC-UA or MQTT protocols.
Virtual Model
Physics-based kinematic and dynamic simulation of every axis, gear train, bearing, and cable chain. Includes thermal and fatigue degradation models.
AI Analytics Engine
Machine learning models trained on historical failures. Compares real-time twin state against degradation curves to compute remaining useful life (RUL).
CMMS Action Layer
Automated work order generation with failure predictions, required parts lists, and optimal scheduling windows synchronized to production calendars.
The Economics of Prediction vs. Reaction
Investing in digital twin technology for robotic maintenance delivers compounding returns. Every prevented catastrophic failure avoids not just repair costs, but cascading production losses, quality escapes, and expedited logistics. The financial model below illustrates why the shift from reactive to predictive is not a technology upgrade—it is a business transformation.
ROI Calculator: Digital Twin Predictive Maintenance
Based on a 20-robot manufacturing cell over 12 months
Reactive / Time-Based
Unplanned Downtime (Avg. 6 events)$720,000
Emergency Parts & Expediting$180,000
Unnecessary Preventive Replacements$95,000
Quality Scrap from Mid-Cycle Failures$60,000
Annual Cost: $1,055,000
VS
Digital Twin Predictive
Digital Twin Platform & Licenses$120,000
Sensor Deployment & Integration$45,000
Training & Change Management$25,000
Planned Repairs (Optimized)$110,000
Annual Cost: $300,000
Manufacturers that implement digital twin predictive maintenance see immediate benefits: dramatically fewer unplanned stops, lower spare parts inventory, extended robot lifespan, and higher OEE scores. The operational data generated fuels continuous model improvement, making the system smarter with every cycle.
Predict Failures Before They Happen
Stop losing production hours to surprise robot breakdowns. Oxmaint integrates digital twin predictions directly into your maintenance workflows—automatically generating work orders, scheduling repairs during planned windows, and tracking every component's remaining useful life in one platform.
Deploying digital twins for robotic predictive maintenance is a maturity journey. It starts with connecting sensor data and building baseline models. From there, teams advance to multi-robot fleet twins, AI-driven failure prediction, and fully autonomous maintenance scheduling that optimizes across production and reliability objectives simultaneously.
Digital Twin Maturity Model
Level 1
Foundation — Connect & Baseline (Months 1-3)
Sensor DeploymentData Pipeline SetupBaseline SignaturesAsset Registry in CMMS
Level 2
Predictive — Model & Forecast (Months 4-9)
Physics Twin CreationRUL Prediction ModelsAuto Work OrdersParts Forecasting
Start by establishing reliable sensor connectivity and clean data pipelines. Build baseline operating signatures during the first 90 days. As your models mature and accumulate confirmed failure data, introduce AI-driven remaining useful life predictions that automatically trigger CMMS workflows for parts ordering and repair scheduling.
Digital Twin Across Robot Types
Digital twin predictive maintenance applies across the full spectrum of industrial robotics—from articulated arms and SCARA robots to collaborative cobots and AGVs. A unified platform ensures consistent prediction quality and maintenance workflows regardless of robot brand, generation, or application.
Unified Digital Twin Across Robot Types
Consistent predictive maintenance for every automation platform
Articulated Arms
SCARA Robots
Delta / Parallel
Collaborative Cobots
AGV / AMR Fleets
Gantry Systems
Welding Robots
Palletizing Cells
Component-Level Tracking
Individual RUL predictions for gearboxes, bearings, servo motors, cables, brakes, and end-effectors across every robot.
Production-Aligned Scheduling
Repairs automatically scheduled during planned changeovers, shift breaks, or low-demand windows to protect throughput.
OEM-Agnostic Analytics
Unified dashboards across FANUC, ABB, KUKA, Yaskawa, Universal Robots, and other platforms for fleet-wide visibility.
Predict and prevent robot failures across your entire fleetGet Started →
By standardizing digital twin practices across all robot types, manufacturers gain fleet-level visibility. This enables smarter capital planning, optimized spare parts inventory, and the ability to benchmark reliability across production lines and facilities. Book a Demo.
Build Your Robot Digital Twin System
Join forward-thinking manufacturers using Oxmaint to turn digital twin predictions into automated maintenance actions. Gain control over robot health, failure forecasts, and repair scheduling. Eliminate unplanned downtime and maximize your automation investment.
A digital twin for robotics is a real-time virtual replica of a physical robot that mirrors its mechanical state, operational loads, and degradation patterns. Unlike a simple 3D model, it runs physics-based simulations—kinematic, thermal, and fatigue models—fed by live sensor data from the actual robot. This allows the twin to predict when specific components (bearings, gearboxes, servos, cables) will degrade to the point of failure, typically weeks before a breakdown would occur.
How is a digital twin different from condition monitoring?
Condition monitoring reads sensor values and triggers alerts when measurements cross predefined thresholds—it tells you a component is degraded NOW. A digital twin goes further by simulating the future. It uses physics models and historical data to project how current degradation trends will evolve, predicting WHEN the component will fail. This shifts maintenance from reactive (respond to alert) to predictive (schedule repair before the alert ever fires), typically providing a 2-8 week advance warning window.
What sensors are needed to build a robot digital twin?
Most modern industrial robots already generate useful data through their controllers: joint torques, motor currents, encoder positions, and internal temperatures. Supplementing with external vibration sensors on gearboxes and thermal sensors on critical bearings significantly improves prediction accuracy. The key is accessing the robot controller's data bus (via OPC-UA, MQTT, or the OEM's API) and installing 3-5 additional IoT sensors per robot on the highest-wear components identified through failure mode analysis.
How does a digital twin integrate with a CMMS?
When the digital twin's prediction engine determines a component's remaining useful life (RUL) has crossed a configurable threshold (e.g., 30 days to failure), it automatically generates a work order in the CMMS. The work order includes the predicted failure component, recommended repair action, required parts (linked to inventory), and a suggested repair window that aligns with production schedules. After the repair, the technician's feedback and actual condition data flow back into the twin to improve future predictions.
What is the typical timeline and ROI for deployment?
A pilot deployment on 3-5 critical robots typically takes 8-12 weeks from sensor installation to first predictions. Scaling to a full production cell takes an additional 2-3 months. Most manufacturers achieve payback within 4-6 months from avoided unplanned downtime alone. Longer-term ROI compounds through reduced spare parts inventory (30% typical reduction), extended robot lifespan (15-20% increase), and higher OEE from eliminating production disruptions.