Every autonomous patrol generates thousands of sensor readings—thermal scans, vibration signatures, acoustic profiles, gas concentrations—but without a structured pipeline into your maintenance platform, this intelligence dies in a robot dashboard nobody checks twice. Connecting quadruped robots to a CMMS through REST API transforms raw inspection telemetry into auto-generated work orders, real-time alert routing, and living asset health records. With the quadruped robotics market growing at 18.7% CAGR and projected to surpass $1.7 billion by 2034, API-driven maintenance automation is no longer experimental—it is the operational standard. Schedule a consultation to see how Oxmaint connects your quadruped inspection data to automated maintenance workflows.
How Quadruped Robots Generate Maintenance-Critical Data
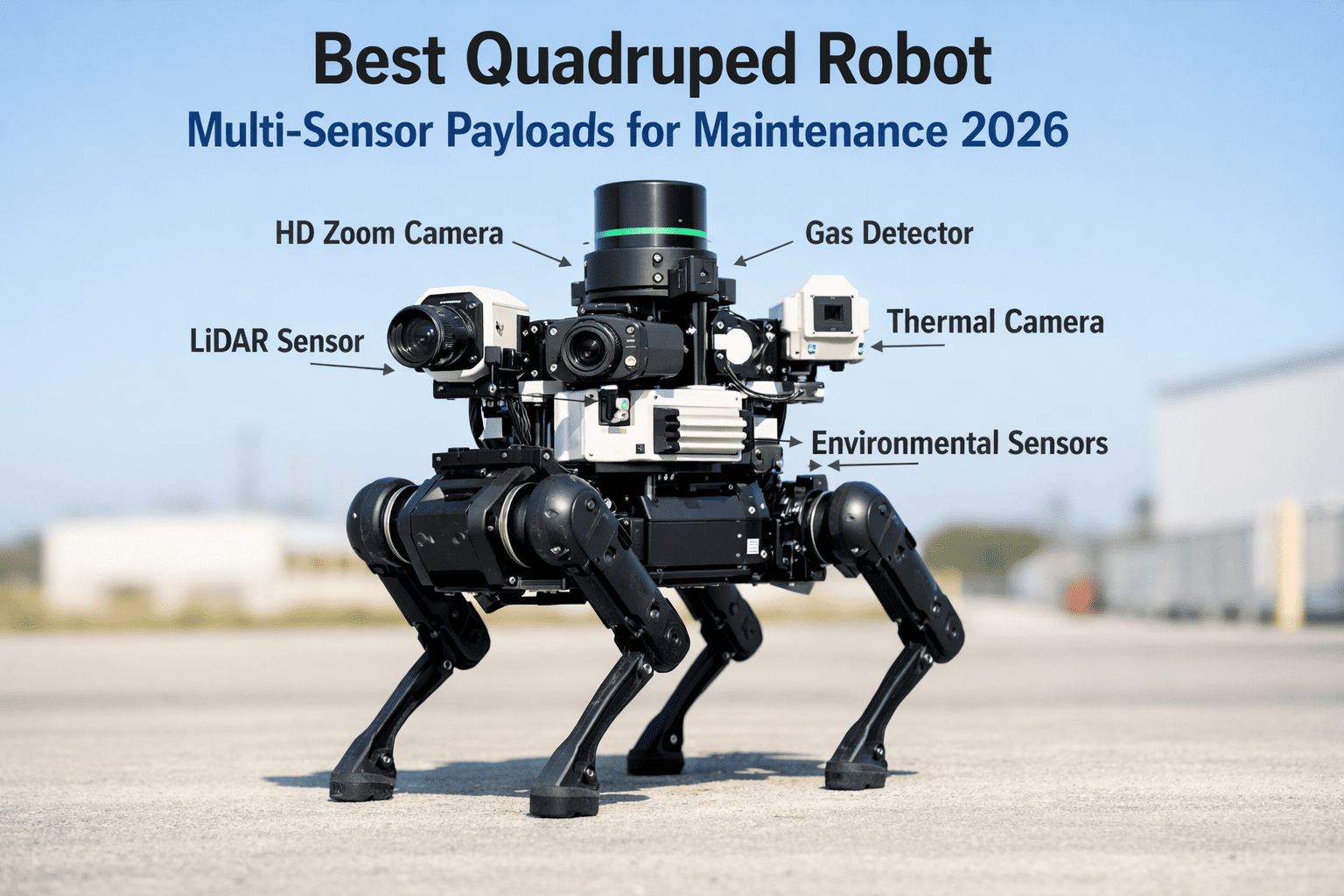
Quadruped robots like Boston Dynamics Spot, ANYbotics ANYmal, and Unitree B2 navigate stairs, grating, and uneven terrain that wheeled robots cannot access—making them ideal for industrial inspection. During every patrol, onboard sensors produce structured data that maps directly to CMMS work order fields when properly integrated via REST API.
Identifies compressed air leaks, valve cavitation, motor bearing wear patterns
CMMS Field: Fault Type, Severity Score, Location Tag
VISUAL
HD + Depth Camera
Reads analog gauges, detects corrosion, identifies fluid pooling, checks seal integrity
CMMS Field: Description, Image URL, Gauge Reading
ENVIRONMENTAL
Gas and Particulate Sensors
Monitors methane, H2S, VOC levels, humidity, and ambient temperature
CMMS Field: Alert Type, Compliance Flag, Zone ID
Your robots already capture this sensor data—are you using it? Sign up for Oxmaint to automatically convert thermal, acoustic, and visual findings into prioritized work orders linked to the right assets.
REST API Architecture: From Robot Patrol to Work Order
A production-grade integration follows a five-layer pipeline. The robot SDK emits structured data, edge processing filters noise, middleware normalizes payloads, the CMMS REST API ingests them, and dispatch logic routes the resulting work orders. Each layer is critical for reliability, and understanding the data flow helps developers build fault-tolerant connectors that scale across multi-robot fleets.
Integration Pipeline Architecture
LAYER 1
Robot SDK Output
Spot uses gRPC via the Boston Dynamics Python SDK. ANYmal exposes RESTful endpoints. Unitree provides ROS2 topic streams. Each platform emits waypoint-stamped sensor payloads after completing inspection checkpoints.
LAYER 2
Edge AI Classification
Onboard or edge-node ML models classify raw sensor data in real time. Thermal thresholds flag hot bearings, acoustic models detect air leaks, computer vision identifies corrosion or fluid pooling. Only actionable anomalies pass downstream.
LAYER 3
Middleware Normalization
A connector service maps robot-specific data formats to CMMS schema. Asset IDs resolve via GPS coordinates, QR code scans, or waypoint-to-asset lookup tables. Findings are packaged into standardized JSON payloads.
The CMMS routes work orders by priority, skill match, and technician location. Mobile notifications deliver robot-captured evidence directly to assigned technicians, closing the loop from detection to resolution without manual handoff.
Spot, ANYmal, Unitree: API Protocol Comparison for CMMS Developers
Each quadruped platform exposes inspection data through different protocols and SDK architectures. The table below maps the five leading platforms to their API interfaces, available data types, and recommended integration paths for CMMS connectivity—critical knowledge for any developer building a robot-to-maintenance connector.
Robot Platform API Compatibility for CMMS Integration
Platform
Primary API
Inspection Data
CMMS Connector Path
Boston Dynamics Spot
gRPC + Orbit REST API
Thermal, visual, acoustic, point cloud, gas
Orbit webhooks to middleware, REST POST to CMMS
ANYbotics ANYmal
REST API + ROS2
Thermal, visual, vibration, gas, 3D LiDAR
Direct REST endpoints, JSON mapping to CMMS API
Unitree B2 / Go2
SDK + ROS2 bridge
Visual, depth, IMU, custom payloads
ROS2 topic bridge to REST adapter, then CMMS
Ghost Robotics Vision 60
ROS2 + proprietary API
Thermal, visual, radiation, CBRN payloads
Custom middleware, JSON normalization to CMMS
Deep Robotics X30
SDK + HTTP callbacks
Visual, thermal, environmental sensors
HTTP event stream to middleware, REST to CMMS
All platforms support middleware-based integration with Oxmaint REST API. The Orbit API (Spot) provides the most mature webhook pipeline for automated CMMS sync.
Not sure which API path fits your robot platform? Schedule a demo and our integration team will map the exact connector architecture for your Spot, ANYmal, or Unitree fleet.
Developers building quadruped connectors need a clear endpoint map. These are the core REST operations required for a complete bidirectional integration—covering work order lifecycle management, asset enrichment, evidence attachment, and alert routing.
POST
/api/v1/work-orders
Robot anomaly triggers new work order with severity, asset ID, GPS coordinates, and evidence attachments
PATCH
/api/v1/work-orders/{id}
Append updated evidence or status changes from subsequent robot patrol passes over the same asset
GET
/api/v1/assets/{id}
Middleware retrieves asset metadata for enriching robot findings before work order submission
POST
/api/v1/attachments
Upload thermal images, acoustic files, or AI classification reports captured during the robot patrol
GET
/api/v1/work-orders?status=open
Deduplication check before creating new tickets—avoids duplicate orders for already-known issues
What Changes When You Automate Robot-to-CMMS Handoff
The operational gap between manual inspection reporting and API-automated robotic workflows reveals why facilities investing in quadruped robots need structured CMMS integration to capture the full return on their robotics investment.
Manual Handoff vs. REST API Automation
Without API Integration
Technician reviews robot dashboard after patrol ends
Findings manually copied into CMMS forms
Asset matching done by memory or spreadsheet
Evidence files downloaded and re-uploaded
24-48 hour delay from detection to action
48hraverage response delay
With REST API Pipeline
Anomaly triggers instant webhook callback
Middleware auto-creates CMMS work order via API
Asset matched by GPS + QR code scan
Evidence attached as base64 or URL reference
Work order live within seconds of detection
<30sfrom detection to dispatch
Stop Copying Data Between Dashboards
Oxmaint's REST API accepts structured inspection data from any quadruped platform—converting findings into prioritized, asset-linked work orders with evidence trails attached automatically.
Facilities that deploy structured API bridges between robot fleets and their CMMS report quantifiable gains across response times, data accuracy, and equipment uptime. These metrics reflect documented outcomes from industrial deployments where robotic inspection data feeds directly into maintenance execution workflows.
90%
Less manual data entry for inspection reporting
70%
Faster response to critical findings
3x
More inspection coverage per shift
45%
Reduction in unplanned downtime
Step-by-Step Integration Deployment for Development Teams
A phased approach prevents costly rework and ensures each layer of the pipeline is validated before moving to the next. This timeline reflects real-world integration projects connecting quadruped fleets to CMMS platforms across energy, manufacturing, and logistics facilities.
Developer Integration Roadmap
Week 1-2
API Discovery and Authentication
Map robot SDK data outputs to CMMS schema. Configure OAuth 2.0 or API key authentication. Establish sandbox connectivity and validate endpoint access.
Week 3-4
Middleware and Connector Development
Build data normalization logic, asset-matching by GPS and QR code, anomaly deduplication rules, and webhook listeners for robot events. Implement message queuing for fault tolerance.
Week 5-6
End-to-End Integration Testing
Validate work order creation from test patrol data. Verify evidence file attachment pipelines. Load-test API throughput and error handling under realistic data volumes.
The robot captures the data, but the CMMS decides what happens next. Without API integration, you have an expensive data collector. With it, you have an autonomous maintenance system that detects, reports, and dispatches—all before a technician opens their laptop.
— Industrial Automation Director, Energy Sector
Connect Robotic Intelligence to Maintenance Execution
Your quadruped robots produce thousands of data points per patrol. Oxmaint's REST API converts that stream into prioritized work orders, asset health trends, and compliance records—automatically. Bridge the gap between inspection and action.
Which quadruped robots can integrate with Oxmaint via REST API?
Oxmaint's REST API accepts structured JSON payloads from any system, making it compatible with all major quadruped platforms including Boston Dynamics Spot (via the Orbit API and webhooks), ANYbotics ANYmal, Unitree B2/Go2, and Ghost Robotics Vision 60. A middleware connector normalizes each platform's data format before posting to the CMMS endpoint. Create your free Oxmaint account to explore the API documentation and submit test payloads from your robot platform.
How does the system match robot findings to the correct CMMS asset?
The middleware layer uses multiple matching strategies simultaneously. GPS coordinates from the robot's localization system are compared against asset location records in the CMMS, QR or barcode tags scanned by the robot's camera are mapped to asset IDs, and patrol waypoint names are linked to CMMS asset hierarchies. This multi-method approach ensures accurate matching even in complex multi-level facilities.
What happens to inspection data during network outages?
Can the CMMS push updated schedules back to the robot fleet?
Yes. Bidirectional integration allows the CMMS to push updated inspection checklists, priority zones, and patrol frequency adjustments back to the robot fleet management platform via REST PUT or PATCH calls. If a critical asset is flagged for increased monitoring, the CMMS can automatically request more frequent patrol passes at that location.
How long does a full quadruped-to-CMMS integration take?