This guide is published by OxMaint as part of its AI Vision Inspection resource series. Steel plants contain some of the most hazardous inspection environments on earth — blast furnace perimeters, coke battery corridors, refractory-lined vessels operating at 1,600°C, and crane rails suspended 30 metres over active production floors. For decades, accessing these areas required human inspectors operating at the edge of thermal and safety limits. In 2026, that model has been replaced. Autonomous drones, quadruped robots, and magnetic crawlers are now conducting inspection missions in conditions that permanently exclude human entry — delivering data of higher quality, at higher frequency, with zero personnel risk. This guide explains how steel plant maintenance teams deploy each platform type, what they detect, and how inspection data becomes actionable maintenance intelligence through CMMS integration.
Blog · Inspection & Monitoring · Steel Industry
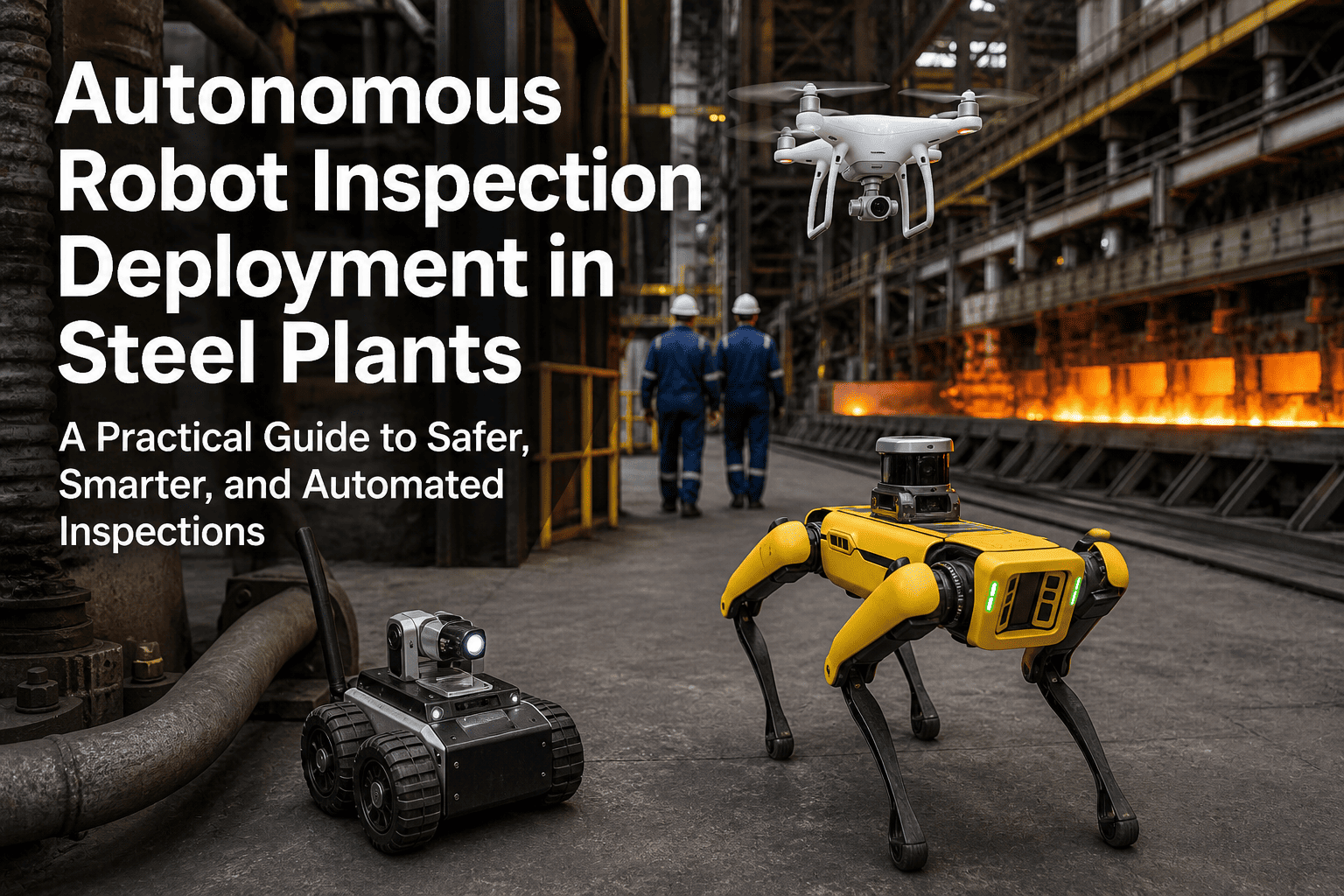
Autonomous Robot Inspection Deployment in Steel Plants
How steel plant maintenance teams are deploying drones, quadruped robots, and magnetic crawlers to inspect blast furnaces, refractory vessels, coke battery corridors, and overhead crane rails — and connecting every finding directly to CMMS work orders.
90%
reduction in Red Zone manual entries per 2026 safety benchmarks
$100K+
scaffolding costs eliminated per roof survey by autonomous drones
5,000+
tonnes of steel production recovered by reducing furnace cooldown cycles
$6.76B
inspection robotics market in 2026, growing at 24% CAGR
1 Steel Plant Zone-by-Zone Robot Deployment Guide
Different zones in a steel plant present fundamentally different challenges for inspection access. This table maps each critical zone to the optimal robotic platform and defines what each robot detects there.
| Zone / Asset |
Human Risk Level |
Robot Platform |
What It Detects |
Frequency |
| Blast Furnace Shell |
Extreme |
Magnetic Crawler + Quadruped |
Refractory thinning, hot-spots, shell deformation, gas leaks |
Continuous / Campaign |
| Coke Battery Corridors |
Extreme |
Quadruped (ATEX certified) |
CO/H₂S gas concentrations, thermal anomalies, structural cracks |
Every shift |
| Crane Rails & Bay Roofs |
High |
Aerial Drone |
Millimetre-level crack detection, rail wear, roof integrity, hot spots |
Weekly |
| Refractory Vessels |
Extreme |
Magnetic Crawler (250°C) |
UT wall thickness, lining erosion maps, liquid metal leak risk zones |
Per campaign |
| Electrical Rooms |
Moderate |
Quadruped |
Thermal anomalies on switchgear, breaker status, acoustic discharge |
Daily rounds |
| Stack Exteriors |
High |
Aerial Drone |
Corrosion, structural cracks, refractory liner condition at top sections |
Quarterly |
| Conveyor Systems |
Moderate |
Quadruped + Drone |
Belt condition, roller bearing temperature, structural support integrity |
Weekly |
| Rolling Mill Floors |
Moderate |
Quadruped |
Equipment temperature, vibration signatures, oil leak detection |
Per shift |
2 What Robot Sensors Detect vs Manual Inspection
The sensor payloads carried by industrial robots collect data that human inspectors physically cannot — whether due to temperature limits, access constraints, or the inherent subjectivity of visual assessment. This comparison shows where robotic detection is not just safer, but technically superior.
| Failure Mode |
Manual Detection Method |
Robot Detection Method |
Advantage |
| Refractory thinning |
Visual during full cooldown (days lost) |
UT crawler maps 250°C surface — no cooldown needed |
Production preserved |
| Crane rail cracks |
Rope access team, 6–8 hours, $100K+ cost |
Drone survey, 12–20 min, millimetre precision |
95% cost reduction |
| Gas leaks (CO/H₂S) |
Human entry with handheld detector — exposure risk |
Quadruped detects sub-metre precision continuously |
Zero human exposure |
| Electrical hotspots |
Periodic thermography by trained inspector |
Daily quadruped patrol with 0.1°C thermal imaging |
10× detection frequency |
| Structural corrosion |
Visual + tap test; misses subsurface loss |
Magnetic crawler UT maps actual wall thickness |
Quantified, not estimated |
| Stack exterior condition |
Binoculars or rope access — quarterly max |
Drone with 4K thermal — complete surface scan |
Full surface coverage |
3 Robotic Inspection ROI Benchmarks for Steel Plants
Data sourced from documented ANYmal deployments at Outokumpu, Gecko Robotics case studies, OxMaint integration deployments 2024–2026, and McKinsey Heavy Industrials robotic inspection benchmarking.
90%
Reduction in hazardous zone human entries across integrated steel plants
5,000+
Tonnes of annual steel production recovered by reducing furnace cooldown cycles
$100K+
Scaffolding and rope access costs eliminated per roof inspection campaign
270+
Inspection checkpoints per day — a single quadruped covering one blast furnace perimeter
24%
CAGR of the global inspection robotics market — $6.76B in 2026 to ~$30B by 2034
Tamper-proof
Automated sensor validation produces audit-ready NDT records for all structural checks
Every Robot Finding Should Become a Work Order
OxMaint's AI Vision Inspection module receives data from drones, quadrupeds, and crawlers — then converts anomalies into prioritised, assigned, and tracked maintenance work orders with full audit trails.
4 Robot-to-CMMS Inspection Workflow
The bottleneck in steel plant robotic inspection is never the robot. It is what happens to the data after the robot completes its mission. Without a CMMS that converts findings into work orders, robot data accumulates in isolated dashboards without driving maintenance action.
01
Mission Scheduled
CMMS triggers autonomous robot patrol based on time or asset condition event
02
Data Captured
Thermal, acoustic, UT, gas, and visual data collected at pre-mapped checkpoints
03
AI Triage
Anomaly detection algorithms classify findings by severity, type, and urgency
04
Work Order Created
OxMaint auto-generates work order with asset location, sensor data, and recommended action
05
Technician Assigned
Work order pushed to correct technician with full inspection evidence attached
A
Asset-Level Traceability
Every robot finding is linked to a specific asset in the CMMS register — creating a full inspection history that grows with every mission and supports lifecycle decisions.
B
Tamper-Proof Audit Records
Automated sensor validation produces NDT records with timestamps, coordinates, and sensor calibration data — meeting ISO and SIL-2 audit requirements without manual report writing.
C
Severity-Based Prioritisation
AI triage classifies findings as critical, watch, or informational — ensuring maintenance teams act on the highest-risk items first, not the most recently reported.
D
Fleet Coordination Console
OxMaint's Robot Fleet Console schedules patrols for multi-platform fleets, preventing mission conflicts and maintaining continuous coverage across all hazardous zones.
DK
The question I hear most often from plant managers is not whether robots can do this — they clearly can. It is whether the data the robot generates will actually change what the maintenance team does on Monday morning. And the honest answer is: it depends entirely on whether the robot is connected to your CMMS or sitting in its own isolated dashboard. We deployed ANYmal on the blast furnace perimeter at a mid-size integrated plant. The robot was detecting thermal anomalies on the shell that the human rounds were completely missing. But until those anomalies automatically became work orders with priority assignments in OxMaint, the findings stayed in a PDF that nobody opened. The moment you close that loop — robot finds anomaly, CMMS creates work order, technician acts — the ROI becomes obvious and immediate.
David Kröger
Plant Reliability Manager, Integrated Steel · Former ANYbotics Implementation Partner · 17 years in Heavy Industrial Maintenance
5 Frequently Asked Questions
Which robot platform is best for blast furnace inspection in steel plants?
No single platform covers all blast furnace inspection requirements — it is a two-platform problem. Magnetic crawlers with ultrasonic transducers are the correct tool for refractory lining thickness mapping on the vessel shell, as they can operate on surfaces up to 250°C without the furnace needing to cool down. This alone recovers thousands of tonnes of production value per year by eliminating cooldown cycles. Quadruped robots running ATEX-certified platforms like ANYmal X are the correct tool for continuous perimeter patrol — detecting gas leaks (CO, H₂S) at sub-metre precision, thermal anomalies on external pipework, and structural condition on access platforms. Together, these two platforms replace most human Red Zone entries on the blast furnace.
How do autonomous drones reduce steel plant inspection costs?
The cost reduction comes from three sources. First, aerial drones eliminate scaffold and rope access mobilisation costs — a single crane rail survey that previously required a rope access team working 6–8 hours at $100,000+ in direct costs is completed by an autonomous drone in 12–20 minutes. Second, autonomous dock-and-fly systems like Percepto Arc operate without a licensed pilot on site, removing the personnel cost of every scheduled inspection. Third, drones cover up to 15 hectares per flight with millimetre-level crack detection resolution — meaning they detect defects earlier, enabling planned maintenance interventions rather than emergency shutdowns. The reduction in unplanned downtime is typically the largest financial benefit, because a single unplanned blast furnace outage costs more than a full year of drone deployment. For market data, the inspection robotics industry is growing at approximately 24% CAGR and is valued at .
Can robots inspect coke battery corridors safely given gas and explosion risks?
Yes — but only ATEX/IECEx certified platforms are appropriate for Zone 1 explosive environments like coke battery corridors. ANYbotics ANYmal X is currently the leading certified quadruped for these environments, and the ANYmal XD model was released in 2026 with expanded capabilities for Zone 1. These robots carry multi-gas telemetry nodes that detect CO and H₂S at sub-metre precision — which is both more sensitive than handheld detectors carried by human inspectors and eliminates all human exposure during monitoring operations. The 2026 industrial safety benchmarks mandate a Robotic First entry policy for hazardous industrial environments aligned with ISO and SIL-2 frameworks. Facilities that have deployed certified quadrupeds in coke battery zones report 90% reductions in personnel entries to these areas during normal operations. The robot data integrates directly with CMMS platforms to auto-generate gas-level alerts and work orders when readings approach threshold levels.
How does OxMaint integrate with robotic inspection platforms?
OxMaint's AI Vision Inspection module is designed to receive inspection data from any robotic platform — drones, quadrupeds, and crawlers — through a standardised integration layer. When a robot detects an anomaly, OxMaint classifies the finding by severity, matches it to the correct asset in the plant asset register, and automatically generates a work order with the sensor data, coordinates, images, and recommended action attached. The Robot Fleet Console in OxMaint allows a single operator to monitor all platforms in the fleet, schedule patrol missions, and view real-time finding maps across all hazardous zones. Every finding is permanently stored in the asset history for lifecycle trend analysis. This connection between robot data and maintenance action is what converts robotic inspection from a safety initiative into a measurable maintenance productivity improvement.
Book a demo to see the integration configured for a steel plant environment.
Connect Your Robot Fleet to OxMaint
From pilot quadruped to a coordinated fleet of 20+ platforms — OxMaint schedules patrols, triages findings, and turns every anomaly into a tracked work order before the shift ends.